Run the simulation
To display the simulated robot in gazebo and rviz
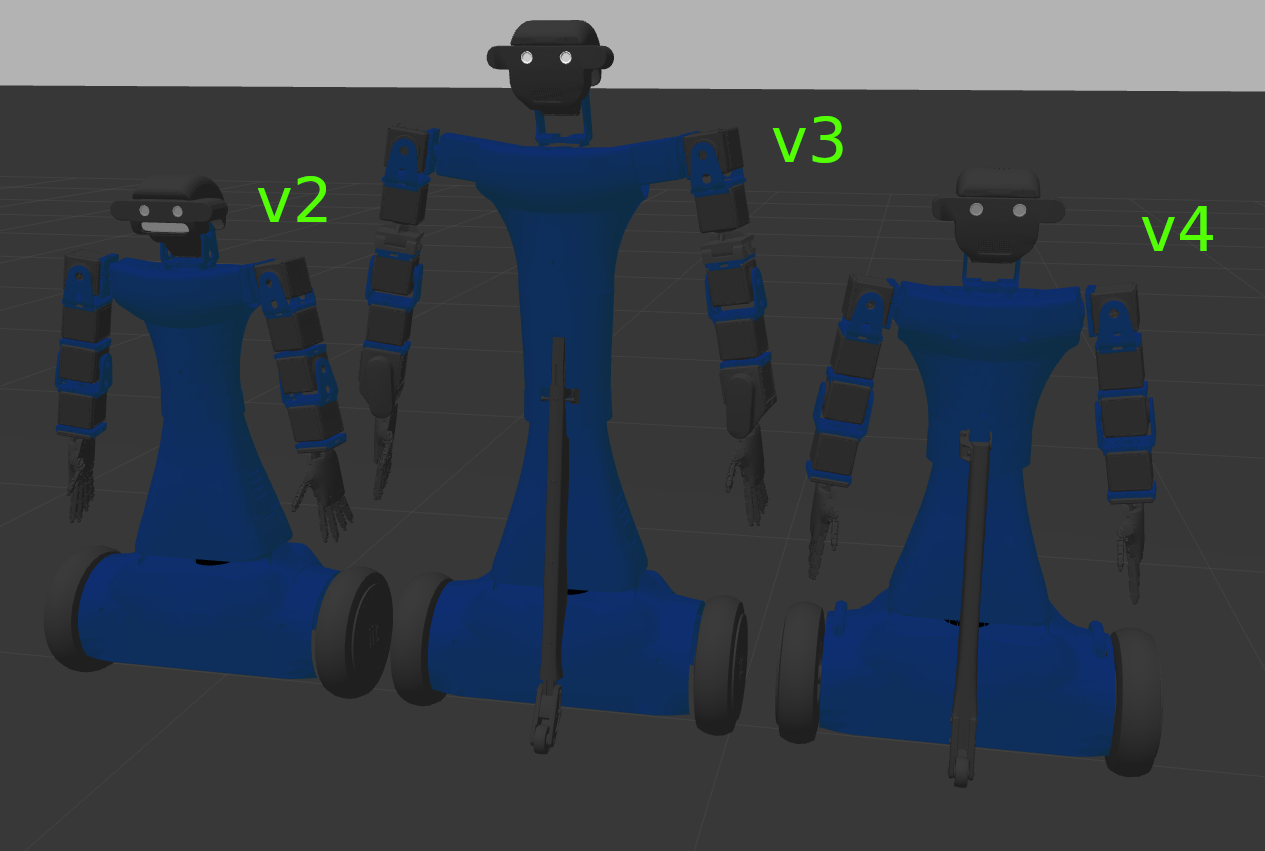
#Change the version if you want to display the version 2(small), 3(tall) or 4(small with kickstand)
roslaunch alterego_gazebo main.launch version:=2
To display the simulated robot in gazebo and rviz
#Change the version if you want to display the version 2(small), 3(tall) or 4(small with kickstand)
roslaunch alterego_gazebo main.launch version:=2